面向中学生的微积分入门指南。
为便于理解,本文约定:
- 所有的函数都为常见的初等函数。
- 所有的数列的下标从 1 开始。
有一个 固定 的数列 {A1,A2,…,An},需要 频繁 计算某个区间 [a,b] 中的总和 T。
T=i=a∑bAi=Aa+Aa+1+⋯+Ab
如果每次都从 Aa 累加到 Ab,运算总次数会很多,效率较低。如何更高效地计算呢?
级数其实就是前缀和,对于接触过算法竞赛的读者,应该并不陌生。
由于数列是固定的,我们可以考虑 预处理。
预处理是指在正式计算之前,提前把一些可能 重复 用到的计算结果算好、存好。
这样之后计算就能更高效,不必重复做相同的事。
前缀和 就是一种常见的预处理技巧,提前计算出 前缀和数列 Sn:
Sk=i=1∑kAi=A1+A2+⋯+Ak
这样,前缀和数列 Sk 就表示数列 {An} 的前 k 项和。
利用前缀和,就可以高效计算任意区间 [a,b] 的和:
T=i=a∑bAi=Aa+Aa+1+⋯+Ab=(A1+A2+⋯+Aa−1+Aa+Aa+1+⋯+Ab)−(A1+A2+⋯+Aa−1)=i=1∑bAi−i=1∑a−1Ai=Sb−Sa−1
因此,通过预处理数列 {An} 得到前缀和数列 {Sn},可以高效区间求和:
T=i=a∑bAi=Sb−Sa−1
对于简单图形,例如 长方形,当我们已知长宽为 a 和 b 时,可以使用 乘法 这个工具来计算其面积:
S=a×b
对于更复杂的图形,例如边界是 曲线 的图形,就需要更高级的面积计算工具——定积分:
S=∫abf(x)dx
其中 ∫ 称为 积分号,a 称为 积分下界,b 称为 积分上界,f(x) 称为 被积函数,dx 称为 微分元。
定积分 ∫abf(x)dx 表示函数 f(x) 图像在区间 [a,b] 中与 x 轴所围成图形的 有向面积:
S=∫abf(x)dx=∣S蓝色∣−∣S黄色∣
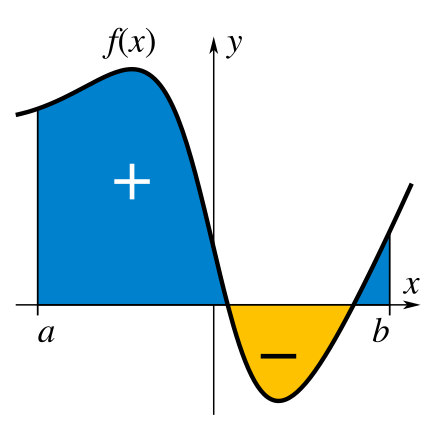
我们日常理解的「面积」都是正数,但在数学中引入了 有向面积 的概念,它可以为负。
在计算定积分时,我们约定:图像在 x 轴 上方 的区域(蓝色)面积为 正,下方 的区域(黄色)面积为 负,这种带符号的面积叫做 有向面积。
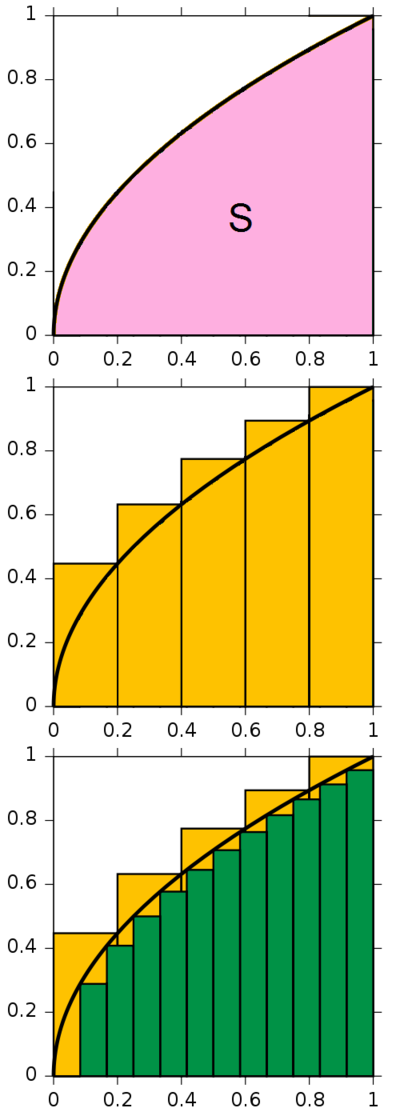
这个符号可以理解为:从 a 到 b 将 无穷多个(n→∞)宽度为 dx、长度为 f(x) 的细长方形面积累加起来。
S=∫abf(x)dx
随着细长方形的数量增加,其总面积会越来越接近实际面积。
对于一些简单图形的定积分,我们可以用公式直接计算。
- Example 1
- Example 2
- Example 3
计算 ∫132xdx。题解
这个积分表达式表示图中 直角梯形 的有向面积。
所以 ∫132xdx=2h(a+b)=22⋅(0.5+1.5)=2。
计算 ∫−232xdx。题解
这个积分表达式表示图中两个 三角形 的有向面积。
所以 ∫−232xdx=2ah−2bh=23⋅6−22⋅4=5。
计算 ∫−224−x2dx。题解
这个积分表达式表示图中 半圆形 的有向面积。
所以 ∫−224−x2dx=21πr2=21π⋅22=2π。
但对于更一般的定积分,无法直接求解。
定积分的定义并不复杂,就是函数 f(x) 在区间 [a,b] 的面积,但我们更关心的是如何计算它。
∫abf(x)dx
前面我们已经通过对 数列 {An} 做 前缀和,得到了 前缀和数列 {Sn},从而高效区间求和:
Sn=i=1∑nAi
数列{An}前缀和前缀和数列{Sn}
类似地,对于 函数 f(x),我们也可以求「前缀和」,从某个 固定点 c 开始,计算函数 f(x) 在区间 [c,x] 的面积,称为 原函数 F(x):
F(x)=∫cxf(t)dt
函数f(x)积分原函数F(x)
这个类似「前缀和」的过程叫做 积分,由于 c 可以是任意常数,所以原函数有 无穷多个。
不定积分 ∫f(x)dx 表示所有可能的原函数,它们之间相差一个常数 C,称为 积分常数:
∫f(x)dx=F(x)+C
这里体现了有向面积的优势:无论 x 与 c 的大小关系如何,公式都能直接适用。
F(x)=∫cxf(t)dt=−∫xcf(t)dt数列可以看作定义域为正整数的特殊函数。
数列是离散的,函数是连续的。
| 对比 | 数列(离散) | 函数(连续) |
|---|
| 对象 | An | f(x) |
| [a,b] 区间「和」 | T=i=a∑bAi
求和 | S=∫abf(x)dx
定积分 |
| 方法 | Sn=i=1∑nAi
前缀和 | F(x)=∫cxf(t)dt
积分 |
| 结果 | Sn
前缀和数列 | F(x)
原函数 |
| 计算 | T=Sb−Sa−1 | S=F(b)−F(a) |
现在,利用原函数,就可以计算 f(x) 在区间 [a,b] 的面积 S:
S=∫abf(x)dx=∫cbf(x)dx−∫caf(x)dx=F(b)−F(a)=F(x)∣ab
其中 F(b)−F(a) 还可以用 竖线求值符号 F(x)∣ab 表示。
至此,我们得到了微积分学中最重要的公式——牛顿–莱布尼茨公式。
∫abf(x)dx=F(b)−F(a)=F(x)∣ab
微积分基本定理 是微积分学中的一条重要定理,由 艾萨克·牛顿(Isaac Newton)和 戈特弗里德·威廉·莱布尼茨(Gottfried Wilhelm Leibniz)在十七世纪分别独立发现,描述了微积分的两个主要运算——微分 和 积分 之间的关系。
微积分=微分+积分
该定理分为两个部分,分别为 微积分第一基本定理 和 微积分第二基本定理,后者也称为 牛顿–莱布尼茨公式。
刚才我们通过模仿数列前缀和的思路,找到了计算定积分的方法:先求出原函数,再计算两点的差值。
F(x)=∫cxf(t)dt
要计算原函数 F(x),首先需要了解 f(x) 与 F(x) 之间的关系。
我们不妨先回到数列,考虑 An 和 Sn 之间的关系。
Sk=i=1∑kAi=A1+A2+⋯+Ak
如果已知 Sn,则有:
Ak=Sk−Sk−1
这个运算过程称为 差分。
而 前缀和 和 差分 互为逆运算:
数列{An}前缀和差分前缀和数列{Sn}
如果 Sn 是 An 的 前缀和数列,An 就是 Sn 的 差分数列。
前缀和表示数列前 n 项的和,而差分表示数列每两项的差,也可以看作数列的 变化速度(变化率)。
考虑什么东西能反映 函数 的变化速度(变化率)呢?
这就是高中阶段学过的 导数:
f(x)=Δx→0limΔxF(x+Δx)−F(x)
而 导数 就是微积分中的 微分。
严格来说,导数 和 微分 是两个不同的概念,但它们的结果 完全相同。
- 导数:函数在某一点的瞬时变化率。
- 微分:当自变量发生微小变化时,因变量的近似变化量。
而 不定积分 和 微分 互为逆运算:
函数f(x)不定积分微分原函数F(x)
回到最初的问题,如何计算原函数呢?
不幸的是,导数可以通过通用公式推导,但不定积分没有这样的通用公式,我们只能通过「凑」来求解。
许多现有的积分公式也是通过「凑」总结出来的。
如果已知函数 F(x) 的导数是 f(x),那么 F(x) 就是不定积分 f(x) 的一个原函数。
- Example 1
- Example 2
- Example 3
计算 ∫132xdx。题解
∫132xdx=4x213=432−412=2
计算 ∫−232xdx。题解
∫−232xdx=x2−23=32−(−2)2=5
计算 ∫−224−x2dx。题解
∫−224−x2dx=(2arcsin2x+2x4−x2)−22=π−(−π)=2π